- Introduction
Problem define: 기존 NeRF 는 너무 많은 수의 image 를 요구하며 너무 긴 optimization 시간으로 인해 impractical
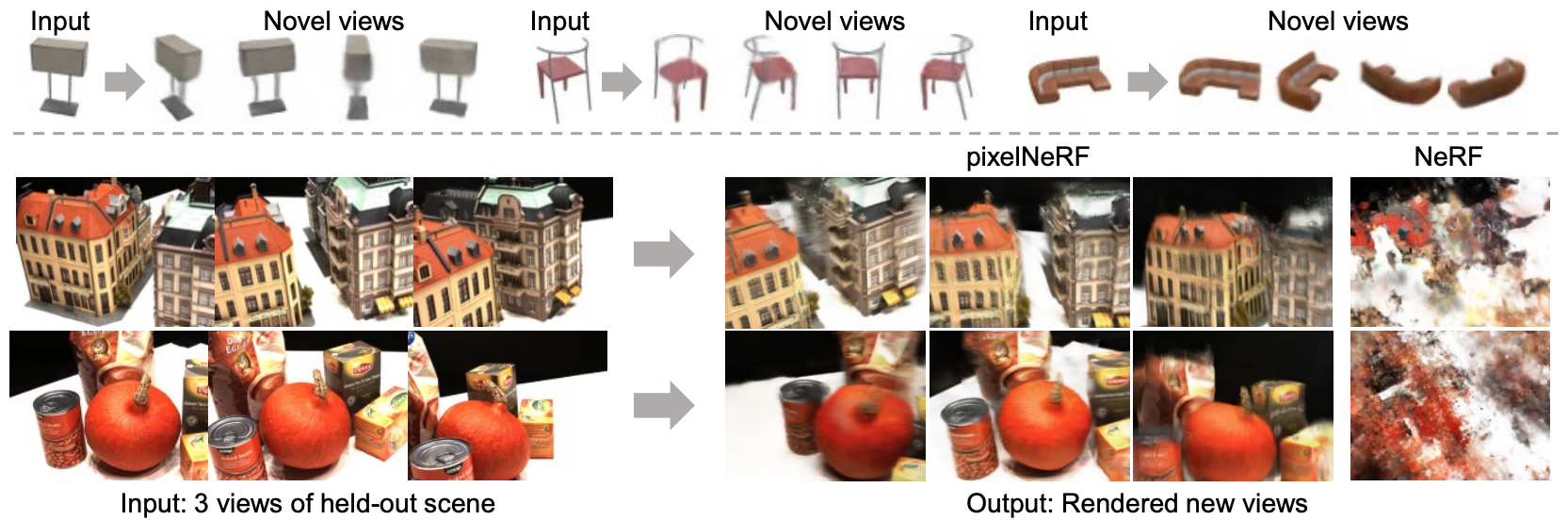
► pixelNeRF 는 image feature 를 사용하지 않는 NeRF 와 달리, 각 pixel 에 aligned 된 spatial image feature 를 input 으로 사용
► pixelNeRF 는 NeRF 와 달리 few input image 로 잘 작동함
Framework
- Single Image
- Input image → Fully convolutional image feature grid
- Sample the corresponding image feature via projection and bilinear interpolation
- Query specification is sent along with the image features to NeRF network
- Multiple Image
- Input image → Latent representation in each camera's coordinate frame
- Pooled in an intermediate layer
View space: Viewer-centered coordinate system
Canonical space: Objected-centered coordinate system
- Method
Total architecture
- Fully-convolutional image encoder $E$: Input image 를 pixel-aligned feature grid 로 encode
- Pretrained ResNet-34
- NeRF network $f$: Outputs color and density

Single-Image pixelNeRF
Input image $\mathbf{I}$
Feature volume $\mathbf{W}=E(\mathbf{I})$
Camera ray $\mathbf{x}$: Retrieve the corresponding image feature by projecting $\mathbf{x}$ to $\pi(\mathbf{x})$
Feature vector $\mathbf{W}(\pi(\mathbf{x}))$: Bilinearly interpolating between the pixelwise features
Image features, position, viewing direction is passed into the NeRF network
$f(\gamma(\mathbf{x}), \mathbf{d} ; \mathbf{W}(\pi(\mathbf{x})))=(\sigma, \mathbf{c})$
$\gamma(\cdot)$: Positional encoding
$\mathbf{d}$: Viewing direction
$\mathbf{x}$: Query point
Multiple Views
기존 연구에선 test time 에 single input view 만을 사용하던 것과는 다르게, pixelNeRF 에선 test time 에 arbitrary number 의 input view 를 사용하여 additional information 을 제공
$i$th input image $\mathbf{I}^{(i)}$
Camera transform from the world space to its view space with $\mathbf{P}^{(i)}=\left[\begin{array}{ll} \mathbf{R}^{(i)} & \mathbf{t}^{(i)} \end{array}\right]$
$\mathbf{x}^{(i)}=\mathbf{P}^{(i)} \mathbf{x}, \quad \mathbf{d}^{(i)}=\mathbf{R}^{(i)} \mathbf{d}$
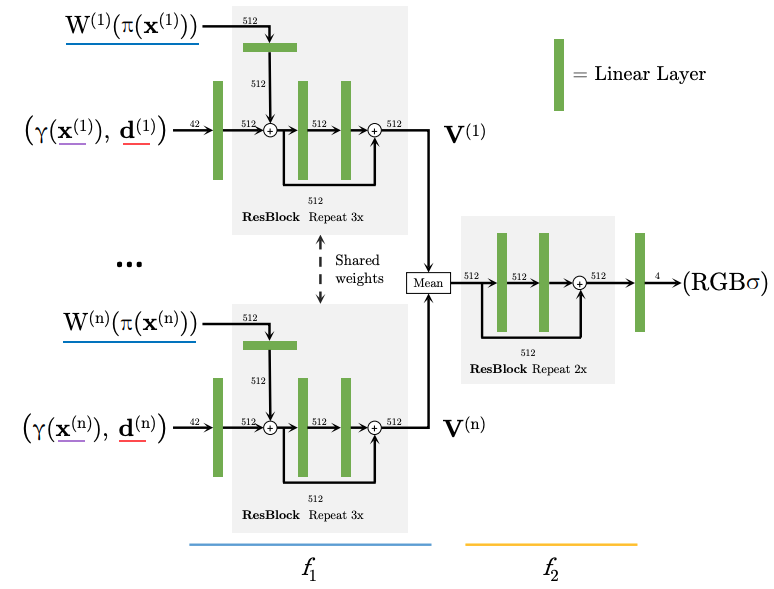
$\mathbf{V}^{(i)}=f_1\left(\gamma\left(\mathbf{x}^{(i)}\right), \mathbf{d}^{(i)} ; \mathbf{W}^{(i)}\left(\pi\left(\mathbf{x}^{(i)}\right)\right)\right)$
$\mathbf{V}^{(1)}$ 부터 $\mathbf{V}^{(i)}$ 의 mean 을 구해 $f_2$ 로 이동
► $(\sigma, \mathbf{c})=f_2\left(\psi\left(\mathbf{V}^{(1)}, \ldots, \mathbf{V}^{(n)}\right)\right)$
만약 single input 인 경우엔 그냥 $f=f_2 \circ f_1$
- Experiment
Datasets
- ShapeNet
- Category-specific
- Category-agnostic
- ShapeNet scenes
- Unseen categories
- Multiple objects
- Domain transfer to real car photos
- DTU MVS dataset
- Real scenes
Baselines
- SRN
- DVR
- SoftRas for category-agnostic setting
Metrics
- PSNR
- SSIM
- LPIPS
Category-specific
Separate model for cars and chairs
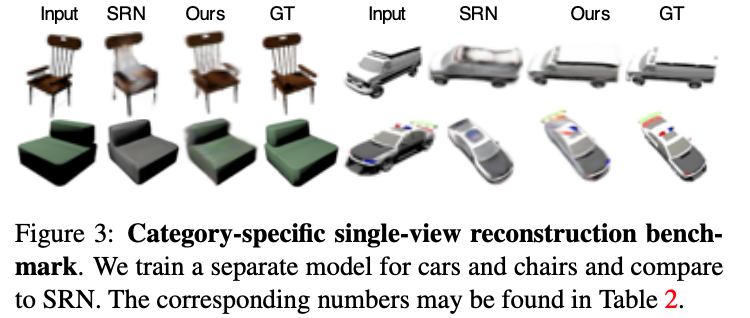
Test time 에 2개의 input view 를 넣었을 때 reconstruction 이 더 잘 됨을 알 수 있음


Category-agnostic
Single model for 13 largest ShapeNet categories

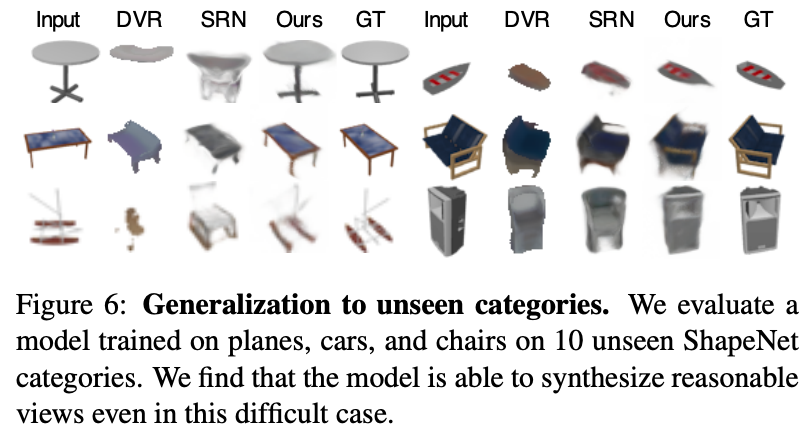
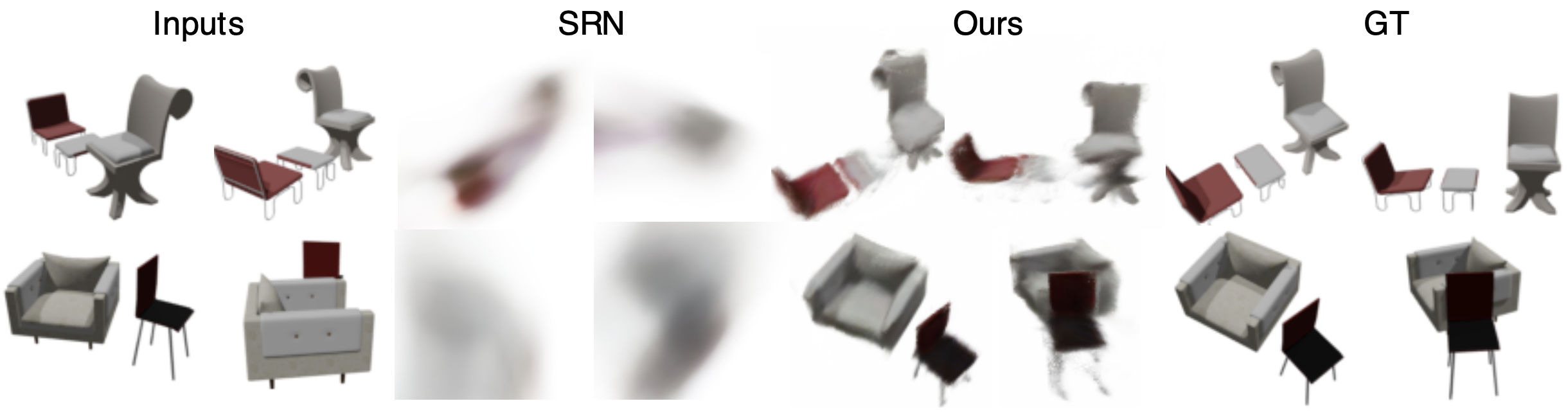
Unseen-categories
Multiple-objects
- Discussion
- Reference
[1] Yu, Alex, et al. "pixelnerf: Neural radiance fields from one or few images." CVPR 2021 [Paper link]